数据结构
绪论
flowchart TD; |
数据结构包括三方面的内容:逻辑结构、存储结构和数据的运算。
逻辑结构: 线性非线性
存储结构: 顺序存储, 链式存储, 索引存储, 散列存储
算法 5 个特性: 有穷性, 确定性, 可行性, 输入, 输出
栈、队列和数组
栈
卡特兰数: n 个不同元素进栈, 出栈元素不同排列的个数为
\[\frac{1}{n-1}C^{n}_{2n}\]
队列
front队头: 删除端
rear队尾: 插入端
循环队列
区分队空还是满: 一般牺牲一个单元来区分, 约定: 队头指针在队尾指针的下一位置作为队满的标志
栈在表达式求值中的应用
(3 + 4) × 5 - 6 就是中缀表达式 - × + 3 4 5 6 前缀表达式 3 4 + 5 × 6 - 后缀表达式
前缀表达式的计算机求值: 从右至左扫描表达式,遇到数字时,将数字压入堆栈,遇到运算符时,弹出栈顶的两个数,用运算符对它们做相应的计算(栈顶元素 op 次顶元素),并将结果入栈
中缀表达式到前缀表达式:
- 初始化两个栈:运算符栈S1和储存中间结果的栈S2;
- 从右至左扫描中缀表达式;
- 遇到操作数时,将其压入S2;
- 遇到运算符时,比较其与S1栈顶运算符的优先级: (4-1) 如果S1为空,或栈顶运算符为右括号“)”,则直接将此运算符入栈; (4-2) 否则,若优先级比栈顶运算符的较高或相等,也将运算符压入S1; (4-3) 否则,将S1栈顶的运算符弹出并压入到S2中,再次转到(4-1)与S1中新的栈顶运算符相比较;
- 遇到括号时: (5-1) 如果是右括号“)”,则直接压入S1; (5-2) 如果是左括号“(”,则依次弹出S1栈顶的运算符,并压入S2,直到遇到右括号为止,此时将这一对括号丢弃;
- 重复步骤(2)至(5),直到表达式的最左边;
- 将S1中剩余的运算符依次弹出并压入S2;
- 依次弹出S2中的元素并输出,结果即为中缀表达式对应的前缀表达式。
后缀表达式的计算机求值: 与前缀表达式类似,只是顺序是从左至右: 从左至右扫描表达式,遇到数字时,将数字压入堆栈,遇到运算符时,弹出栈顶的两个数,用运算符对它们做相应的计算(次顶元素 op 栈顶元素),并将结果入栈
将中缀表达式转换为后缀表达式:
- 初始化两个栈:运算符栈S1和储存中间结果的栈S2;
- 从左至右扫描中缀表达式;
- 遇到操作数时,将其压入S2;
- 遇到运算符时,比较其与S1栈顶运算符的优先级: (4-1) 如果S1为空,或栈顶运算符为左括号“(”,则直接将此运算符入栈; (4-2) 否则,若优先级比栈顶运算符的高,也将运算符压入S1(注意转换为前缀表达式时是优先级较高或相同,而这里则不包括相同的情况); (4-3) 否则,将S1栈顶的运算符弹出并压入到S2中,再次转到(4-1)与S1中新的栈顶运算符相比较;
- 遇到括号时: (5-1) 如果是左括号“(”,则直接压入S1; (5-2) 如果是右括号“)”,则依次弹出S1栈顶的运算符,并压入S2,直到遇到左括号为止,此时将这一对括号丢弃;
- 重复步骤(2)至(5),直到表达式的最右边;
- 将S1中剩余的运算符依次弹出并压入S2;
- 依次弹出S2中的元素并输出,结果的逆序即为中缀表达式对应的后缀表达式(转换为前缀表达式时不用逆序)。
稀疏矩阵
三元组:(行标, 列表, 非零值)
十字链表法
KMP 算法.
举例来说,有一个字符串"BBC ABCDAB ABCDABCDABDE",我想知道,里面是否包含另一个字符串"ABCDABD"?并返回起始 index
右移位数 = 已匹配的字符数 - 对应的部分匹配值, 已匹配的字符数: 当前匹配失败字符之前的字符数; 对应的部分匹配值: 查表 匹配值: 前缀和后缀相同的字符数, 如abcda 的匹配值是1, abcab 的匹配数是 2 再将匹配值右移, 并以 -1 开始
pattern_char: | a | b | c | d | a | b | a | |
class Solution { |
树与二叉树
基本术语
结点的度: 一个结点的孩子的数量, 例如二叉树<=2
数的度: 树中结点的最大度数, 例如二叉树<=2
度>0 为分支结点, 度=0 为叶结点
结点的深度: 根结点深度为 1, 从根结点到叶结点累加
结点的高度: 从叶结点到根结点累加
树的高度: 树的最大层数
路径长度: 路径上经过的边的个数
平衡因子(Balance Factor, BF)是某个节点左子树和右子树的高度之差
\[树的结点数 =\sum{结点度数} +1\]
度为 m 的树第 i 层上至多有 \[m^{i-1}\]个结点
高度为 h 的 m 叉树至多有\[\frac{(m^{h}-1)}{m-1}\]个结点(\[S=m^{h-1}+m^{h-2}+...+m+1\])
具有n 个结点的 m 叉树的最小高度为\[\lceil log_m(n(m-1)+1) \rceil\] (取自前一结论)
二叉树的定义及其主要特性 (性质都要求递归)
满二叉树: 满的二叉树
完全二叉树: 满二叉树删去"倒数的几个节点"
二叉排序树: 左子树小于根节点, 右子树大于根节点
平衡二叉树: 树上任意节点的左右子树深度之差<=1
二叉树的性质
- \[n_0 = n_2 +1\]
- 完全二叉树从上到下, 从左到右, 从 1 到 n, 对于节点 i
- \[parent = \lfloor\frac i 2\rfloor\]
- \[leftchild = 2i\] , \[rightchild = 2i+1\]
- \[depth = \lfloor log_2 i +1 \rfloor\]
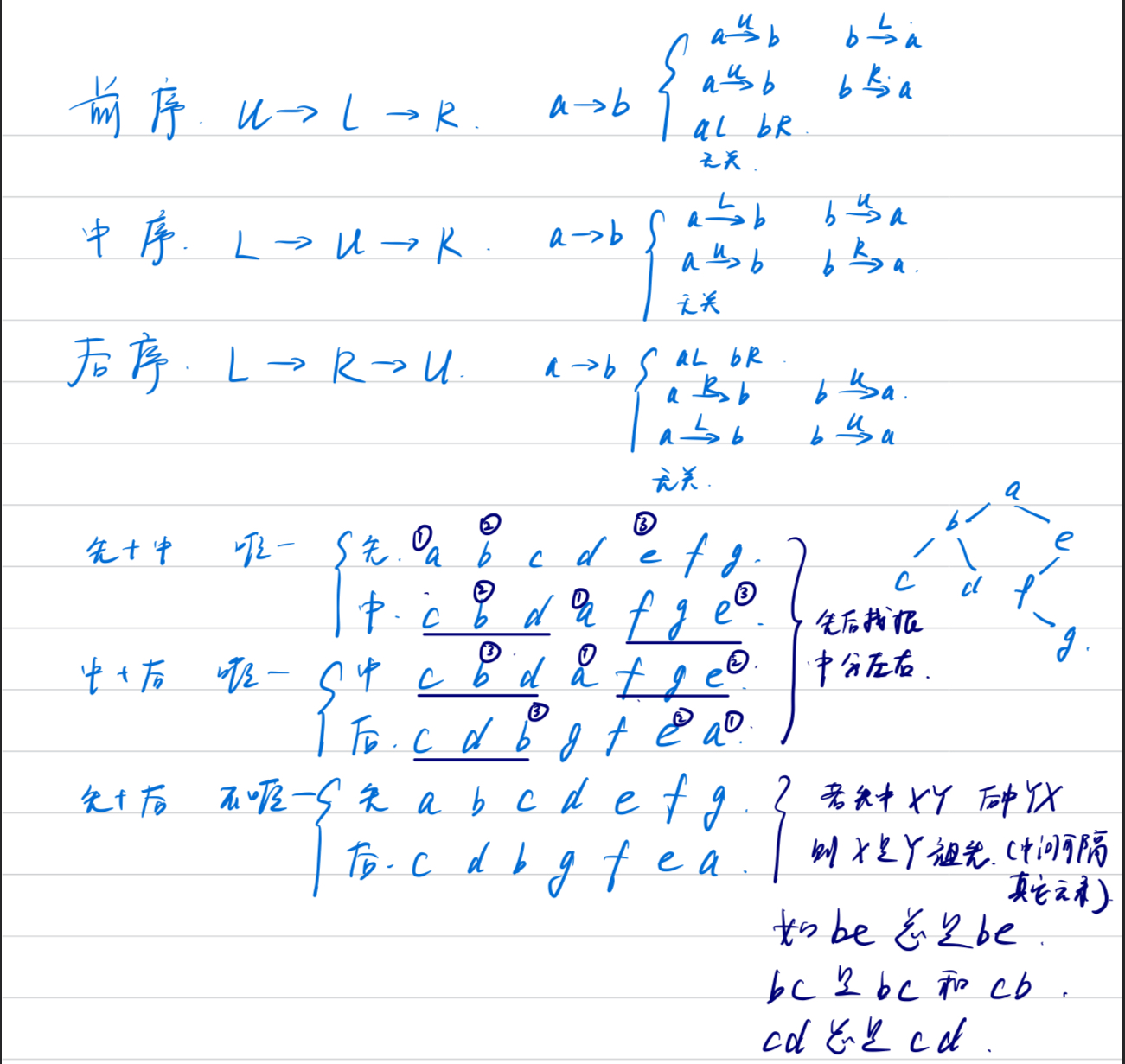
二叉树的遍历
typedef int value_t; |
根据遍历结果构造二叉树
线索二叉树
规定: 若无左子树, lchild 指向前驱节点, 若无右子树, rchild 指向后继节点, ltag=1 代表前驱, rtag=1 代表后继 根据遍历方式可分为前序中序后序线索二叉树
class ThreadBiTree { |
树、森林
双亲表示法
typedef struct{ |
孩子表示法
┌─┬─┐ ┌─┐ ┌─┐ |
孩子兄弟表示法(二叉树表示法)
typedef struct CSNode{ |
树、森林与二叉树的转换
树->二叉树(唯一)
每个节点左指针指向第一个孩子, 右指针指向本节点相邻的右兄弟(左孩子右兄弟)
森林->二叉树(唯一)
现将每棵树转换为二叉树, 将树的根节点彼此视为兄弟连接到右指针上(从树->二叉树时, 根节点的右必为空)
树和森林的遍历
树遍历
- 先根遍历, 先访问根节点,再访问每棵子树, 类似对应二叉树的先序遍历
- 后根遍历, 先遍历子树再访问根节点, 类似对应二叉树的中序遍历
森林遍历
- 先序遍历, 先访问根节点,再访问每棵子树, 类似对应二叉树的先序遍历
- 中序遍历(也叫后序遍历), 先遍历子树再访问根节点, 类似对应二叉树的中序遍历
哈夫曼树和哈夫曼编码
带权路径长度
\[WPL = \sum_{i=1}^{n}{w_il_i}\]
\(w_i\)为第 i 叶节点的权值, \(l_i\)为该叶节点到根节点的路径长度
WPL 最小的二叉树称为哈夫曼树(最优二叉树)
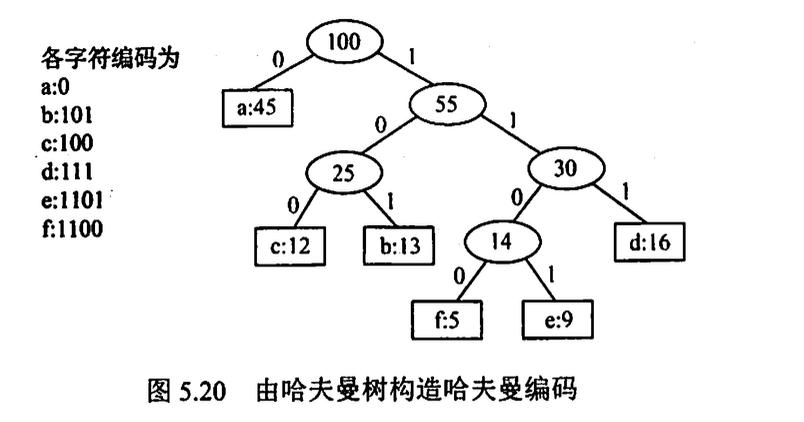
构造哈夫曼树
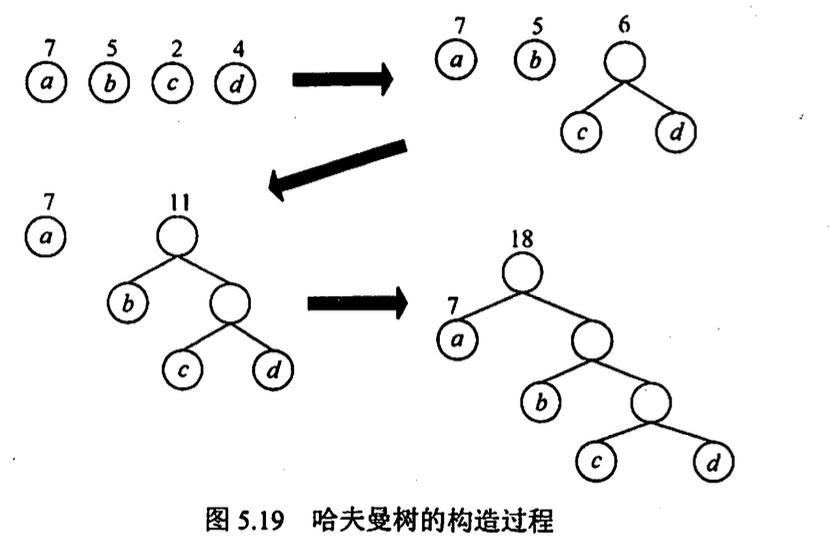
哈夫曼编码是一种可变长度编码, 使用频率越高长度越短
哈夫曼树不一定唯一(左右子树是 0 或 1 不规定; 有相同权值的节点. 但所有哈夫曼树最后的 WPL 是相同的)
并查集
并查集的思想是用一个数组表示了整片森林(parent),树的根节点唯一标识了一个集合,我们只要找到了某个元素的的树根,就能确定它在哪个集合里。
图
图的定义
简单图: 如果图满足: 不存在重复边, 不存在顶点到自身的边
完全图: 每两个顶点之间都存在边(有向图则需要两条边) \(E = \frac{n(n-1)}{2}\)
子图: 顶点和边都是子集
生成子图: 顶点相同, 边是子集
连通图: 无向图中任意顶点都是连通的, 无向图中的极大连通子图称为连通分量
强连通图: 有向图中任意中任意顶点都是连通的, 有向图中的极大强连通子图称为连通分量
生成树: 连通图的生成树是包含全部顶点的一个极小连通子图, 对生成树而言, 去掉一条边就会变成非连通图, 加上一条边就会出现回路
生成森林: 非连通图中连通分量的生成树构成了飞连通图的生成森林
带权图又称网
稀疏图稠密图: 当满足\(|E|<|V|log|V|\) 可视为稀疏图
路径长度: 路径上边的个数
简单路径: 顶点不重复出现的路径
距离: 最短路径的长度
有向树: 一个顶点入度=0, 其余顶点入度=1 的有向图称为有向树
图的存储
邻接矩阵法
|
适用于稠密图
无向图只需存储三角矩阵的元素
\(A^n\)的元素\(A^n[i][j]\)等于从 i 到 j 顶点长度为 n 的路径的数量
难以数出边的数量
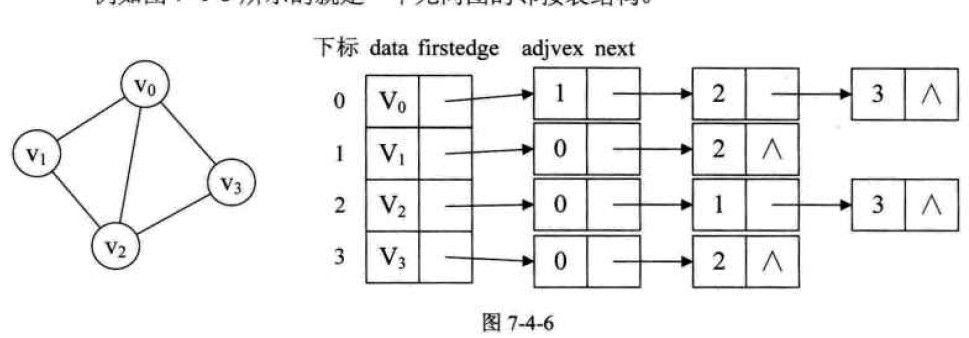
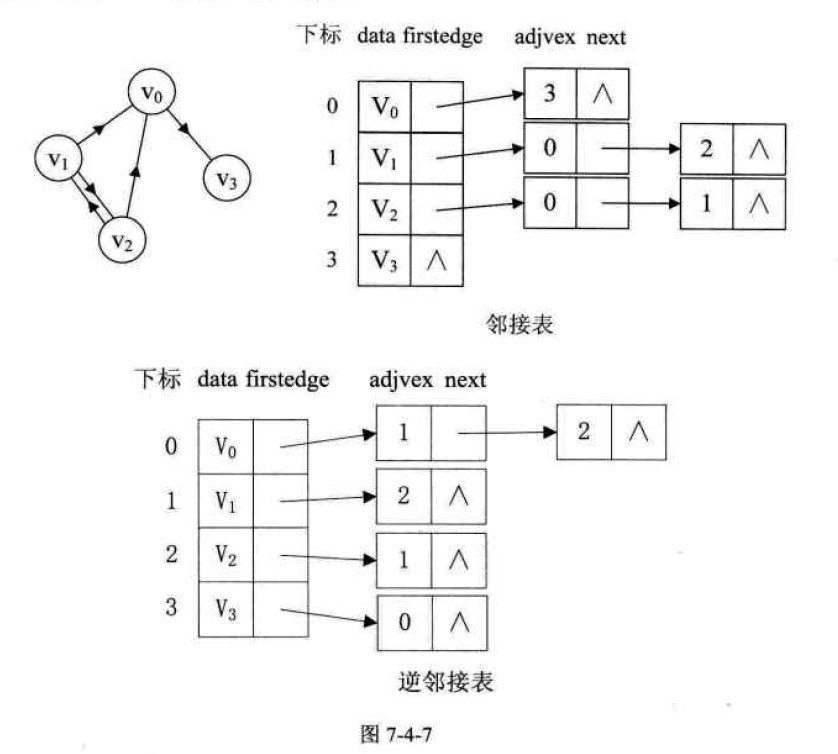
邻接表法
|
无向图的存储中会有重复
难以判断两顶点之间是否存在边
有向图存储的是出度边, 难以数出入度
邻接表不唯一
十字链表(有向图)
typedef struct ArcNode{ |
邻接多重表(无向图)
typedef struct ArcNode{ |
图的遍历
广度优先搜索 BFS
别混合 dfs, bfs 是一层一层的
vector<bool> visited(MAX, false); |
空间复杂度: S(V)
邻接表时间复杂度: O(V+E)
邻接矩阵时间复杂度: O(V2)
BFS求单源最短路径
|
深度优先搜索 DFS
vector<bool> visited(MAX, false); |
空间复杂度: S(V) 运行栈
邻接表时间复杂度: O(V+E)
邻接矩阵时间复杂度: O(V2)
最小生成树
边的权值之和最小的生成树称为最小生成树
当各边权值不相等时, 最小生成树唯一, 树的最小生成树是自己本身 1.对图中的每一条边,扫描其他边,如果存在相同权值的边,则对此边做标记。 2.然后使用Kruskal(或者prim)算法求出最小生成树。 3.如果这时候的最小生成树没有包含未被标记的边,即可判定最小生成树唯一。 如果包含了标记的边,那么依次去掉这些边,再求最小生成树,如果求得的最小生成树的权值和原来的最小生成树的权值相同,即可判断最小生成树不唯一。
最小生成树的边数=顶点数-1
通用方法
从∅开始, 加入权重最小的边, 且保证不出现回路
get_min_generate_tree(g)
tree = null
while tree isnot generate_tree
do:
找到一条权重最小边(u, v),
并且加入 tree 后无回路
tree = tree+(u, v)Prim 算法
从∅开始,加入权重最小的边, 边的一个顶点是已收入集合的, 一个顶点是未收入集合的
Prim(g, tree)
tree = null
V_tree = {w} # any vertex as w
while V-V_tree != null:
find (u, v)where:
u isin V_tree,
v isin V-V_tree,
and (u, v) is min
Tree = Tree + (u, v)
V_tree = V_tree + vO(V2)
Kruskal 算法
从∅开始, 初始认为每个顶点为一棵单独的树, 加入权重最小的边及其两个顶点, 边的两个顶点分别属于不同的连通分量
Kruskal(V, tree)
tree = V
# connected component 连通分量
connect_cp_count = n
while connect_cp > 1:
find min(u, v) in E
if u, v isin different conncted component:
tree = tree + (u, v)
connect_cp_count--
dijkstra 算法 单源
邻接矩阵时间复杂度: O(V2)
邻接表时间复杂度: O(V2)
有边权值为负时, 不适用
从只有出发点的集合开始,加入距离最近的点,将集合整体看做一个点,更新到集合外点的距离 |
floyd 算法 多源
\(A^k[i][j] = Min\{A^{k-1}[i][j], A^{k-1}[i][k] + A^{k-1}[k][j]\}\)
循环 n 次(n 为顶点数)
private void floyd() { |
拓扑排序
AOV 网(Activity on Vertex Network) 有向边<Vi, Vj>表示 i 活动优先于 j 活动
拓扑排序(拓扑序列): 在有向无环图中, 每个顶点只出现一次, A 在 B 前则不存在从 B 到 A 的路径( 步骤:
- 从 AOV 中选择一个没有前驱的顶点并输出
- 删除该顶点和所有以它为起点的有向边
- 重复 1, 2 直到 AOV 为空
邻接表时间复杂度: O(V+E)
邻接矩阵时间复杂度: O(V2)
关键路径
AOE 网(Activity On Edge Network), 顶点表示事件, 边表示活动, 边上的权值表示活动开销
AOE 网只有一个入度=0 的点, 一个出度=0 的点
AOE 网中的最长路径为关键路径, 关键路径上的点叫做关键活动
- 事件 vk的最早发生时间 ve(k) ve(源点) = 0 \(ve(k) = Max\{ ve(j)+Weight(v_j, v_k) \}\) 其中 k 为 j 的任意后继 计算 ve 从源点开始从前向后
- 事件 vk的最迟发生时间 vl(k) vl(汇点) = ve(汇点) \(vl(k) = Min\{ vl(j)-Weight(v_k, v_j) \}\) 其中 k 为 j 的任意前驱 计算 ve 从汇点开始从后向前
- 活动 ai最早开始时间 e(i) = ve(k), 其中<vk, vj>表示活动 ai
- 活动 ai最迟开始时间 l(i) = vl(j) - Weight(vk, vj), 其中<vk, vj>表示活动 ai
- 活动 ai最早开始时间与最迟开始时间差额 d(i) = l(i) - e(i), 即时间余量
AOE 网算法:
- 从源点除法算 ve(事件 vk的最早发生时间)
- 从汇点出发算 vl(事件 vk的最迟发生时间)
- 根据 ve 求 e (活动 ai最早开始时间)
- 根据 vl 求 l (活动 ai最迟开始时间)
- 根据e, l 求 d, 所有 d=0 的活动构成关键路径
查找
平均查找长度 \(ASL = \sum^n_{i=1}P_iC_i\)
Pi为查找概率, 一般认为是 1/n, Ci是需要进行比较的次数
顺序查找
利用哨兵减少判断语句
一般线性表: 遍历
\(ASL_{success} = \sum^n_{i=1}\frac1n(n-i+1) = \frac{n+1}2\)
\(ASL_{failed} = n+1\)
有序表顺序查找
判定树
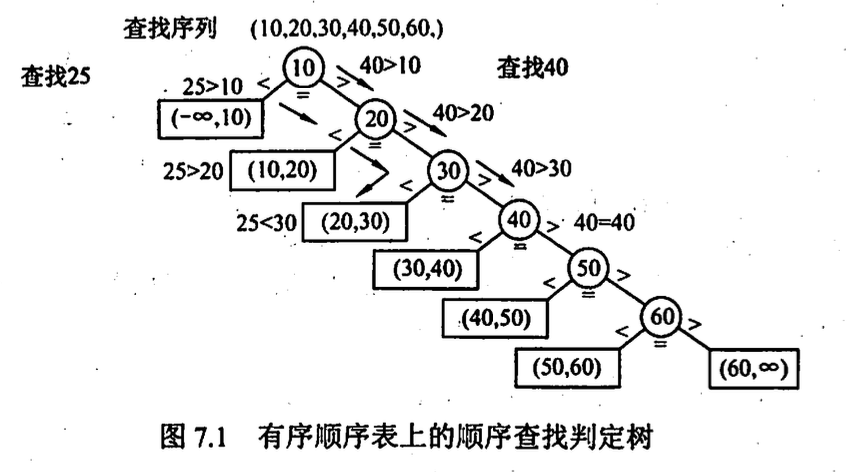
\(ASL_{success} = \sum^n_{i=1}\frac1n(n-i+1) = \frac{n+1}2\)
\(ASL_{failed} = \sum^n_{i=1}q_i(l_i-1) = \frac{1+2+...+n+n}{n+1} = \frac n2 + \frac n{n+1}\)
qi为失败概率, li为节点层数
折半查找 (二分查找, 有限顺序表)
typedef int elemtype; |
判定树(平衡二叉树)
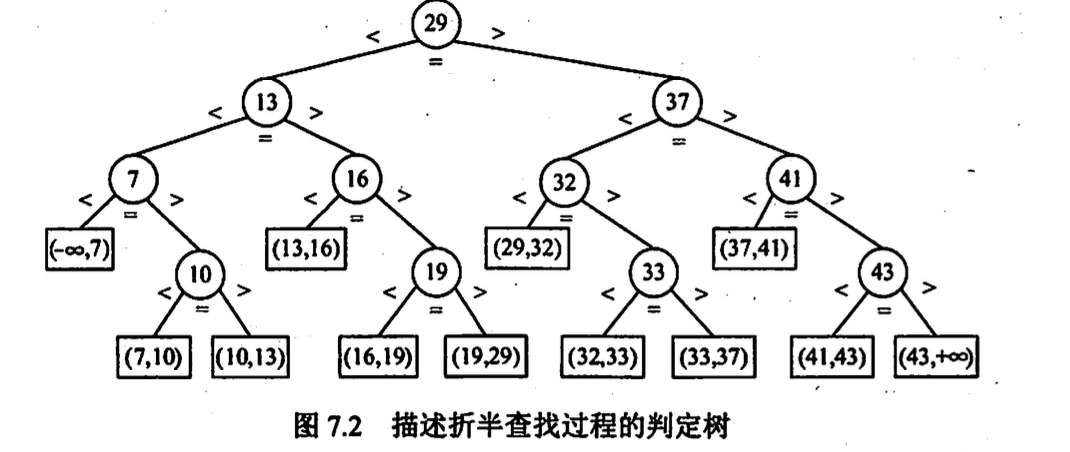
$ASL_{success} = 1n ^n_{i=1}l_i $
$= 1n(11+22+43+...+h2^{h-1}) $
$= n log_2(n+1) - 1 $
\(\approx log_2(n+1) -1\)
查找成功, 次数为层数;
查找失败, 次数为叶节点层数+1(两种情况, 如 6, 9 分别对应 3, 4 次比较)
分块查找
将顺序表通过取关键字切分为多个块, 块之间有序, 块内无序
\(ASL = L_I + L_S = \frac{b+1}2 + \frac{s+1}2 = \frac {s^2+bs+2s}{2s} = \frac{s^2 + n + 2s}{2s}\)
当 \(s = \sqrt n\) 时有最小值 \(\sqrt{n+1}\)
二叉排序树 (BST) (搜索树, 查找树)
提高增删改查速度
定义: 左子树上所有结点 < 根节点, 右子树上所有结点 > 根节点, 左右子树也是二叉排序树
对其进行中序遍历可以得到一个递增的有序序列
给定初始值序列, 二叉排序树唯一, 只给定初始值不给序列, 二叉排序树不唯一
node* BSTSearch(node* root, elemtype key) { |
elemtype BSTInsert(node* root, elemtype data) { |
void CreateBST(node* root, elemtype datas[], int data_length) { |
删除: 左子树或者右子树为空: 用另一个子树替代
左右子树均不为空: 令要删除的节点的直接后继(直接前驱)(中序)替代, 删除该后继, 之后重复
\(ASL = O(log_2n)\)
当使用有序序列构造时获得最差情况单枝树, ASL = O(n)
平衡二叉树 AVL 树(Adelson-Velsky and Landis Tree)
定义: 任意节点左右子树高度差 <= 1
平衡二叉树插入: 插入节点后调整平衡 找第一个不平衡节点
- LL A 的左子树的左子树上插入

- RR 同上
- LR A 的左子树的右子树上插入

- RL 同上
平衡二叉树删除: 删除后调整, 从叶到根层层调整(可能调整多次)
红黑树
定义:
- 每个节点是红或黑, 根节点和叶节点为黑(空节点被视为叶节点)
- 不存在相邻红节点
- 对每个节点, 从该节点到任意叶节点的简单路径上的黑节点数量相同, 其数量叫做黑高 bh, 根节点的黑高为树的黑高
红黑树的插入
- 按照二叉排序树方法插入节点z, 并着红色, 如果父节点是黑色则插入完毕
- 如果z 是根节点, 着黑色, 插入完毕
- 如果 z 父节点是红色, 类似平衡二叉树
- z 叔节点 y 是黑色, z 是右孩子 LR
- z 叔节点 y 是黑色, z 是左孩子 LL
- z 父节点和叔节点都红 将父节点和叔节点变黑, 爷节点变红, 将爷节点视为插入节点, 重复
红黑树的删除 ?
- 按二叉排序树方法删除
- 删除节点如果只有左或右子树, 直接删除并变色
- 删除节点为红且没有孩子, 直接删除
- 删除节点y为黑且没有孩子, 寻找空节点 x 替代, 视 x 为双重黑节点
- x 的兄弟节点 w 为红, 对 w 做 L(左旋) 操作, 转换到情况 2, 3, 4
- x 兄弟节点 w 为黑, w 右孩子为红 RR, 对 w L
- x 兄弟节点 w 为黑, w 左孩子为红, 右孩子为黑, 对 w R, 回到情况 2
- x 兄弟节点w 为黑, w 左右孩子都为黑, 将 w 变红, x.p 变黑
B树和B+树
eg: 用磁盘数据库, 需要索引(key=index, value=pointer to sector) 索引过大时需要索引的索引, 因此需要 b 树
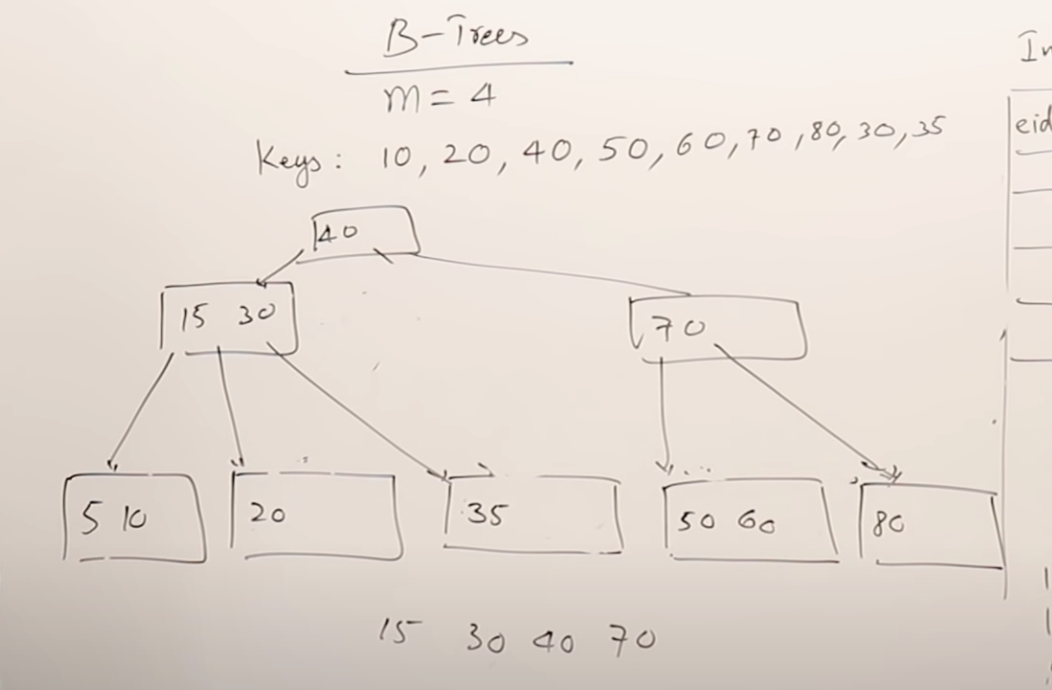
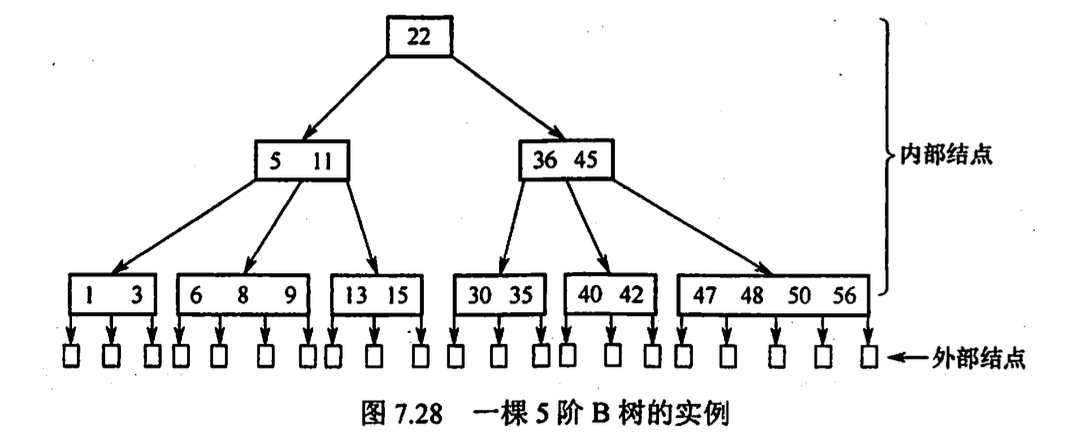
B树(B-树)及其基本操作
m 阶 B 树为所有结点平衡因子都为 0 的 m 路平衡查找树
定义:
每个节点至多有 m 棵子树
除根节点外所有非叶节点至少有\(\lceil \frac m2 \rceil\)棵子树
非叶节点结构如下
┌──────────────────────────┐
│n p0 k1 p1 k2 p2 ... kn pn│
└──────────────────────────┘
k 为关键字(已升序排序), p 为子树指针, n 为关键字数量
每个内部节点的每个关键字都都带有数据所有叶节点(外部节点, 空节点)在同一层且不带信息, 即指向叶节点的指针是空指针
b 树的高度一般不包括叶节点
B 树高度(不包含最后一层空指针(有无都可?))
高度为 h 的有 n 个关键字的 m 阶 B 树:
$n(m-1)(1+m+m2+m3 + ... + m^{h-1}) = m^h-1 $
对于关键字数为 n 的 B 树, 最后一层空节点的个数为 n+1
\(n+1\geq 2(\lceil \frac m2 \rceil)^{h-1}\)
B 树插入关键字k
- 寻找倒数第一层非空节点(即寻找插入位置)
- 如果插入后关键字数<m-1 直接插入, 否则对节点进行分裂
- 从中间位置(\(\lceil \frac m 2 \rceil\))分割, 左边保留在原结点, 右边进入新节点, 中间关键字进入父节点, 若父节点关键字超出, 重复此操作
B 树删除关键字 k
- 对于不是最底层非叶结点的关键字, 可以用 k 的前驱(后继)k'替代 k, 直到 k'落入最底层非叶结点
- 在终端节点中: 若关键字个数>=\(\lceil \frac m2 \rceil\), 可以直接删除
- 在终端节点中: 若关键字个数<\(\lceil \frac m2 \rceil\), 且兄弟可借, 则调整父节点与兄弟节点
- 若兄弟不够借, 则删除后与兄弟节点合并, 此时父结点内关键字会减少, 重复此过程直到符合 b 树要求
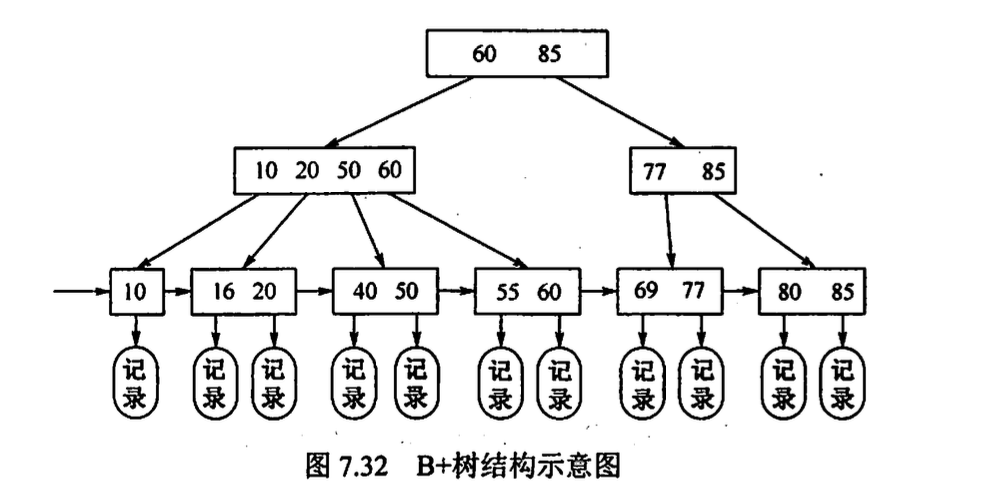
B+树的基本概念
- 每个节点至多有 m 棵子树,
- 除根节点外所有非叶节点至少有\(\lceil \frac m2 \rceil\)棵子树
- 节点子树个数与关键字数相同
- 所有叶节点包含全部关键字和指向其记录(数据)的指针, 叶节点中关键字排序, 相邻叶节点相互链接
- 分支节点中仅包含它各个子节点中关键字的最大值及其指针
B*树
是B+树的变体,在B+树的非根和非叶子结点再增加指向兄弟的指针
B树定义了非叶子结点元素个数至少为(2/3)M,即块的最低使用率为2/3(代替B+树的1/2)
B*的查询、插入和删除操作和B+树差不多
只不过会遵循非叶子结点元素个数至少为(2/3)*M的特点
比如,对于3阶B*树,当元素个数大于1的时候
每个非叶子节点的元素个数,至少为两个
散列表
散列函数: hash(key) = addr
散列表: 根据关键字直接进行访问的数据结构, 是一种直接映射
装填因子 \(\alpha = \frac{散列表中记录数 n}{散列表总长度 m}\) 即散列表装满的程度, α越大装的越满
散列函数的构造方法
直接定址法
h(key) = a*key +b除留余数法
h(key) = key%p数字分析法
对关键字进行分析, 考察分布均匀程度
平方取中法
取关键字的中间几位作为散列地址
处理冲突的方法
开放定址法
\(h_i = [h(key)+d_i]\%m\)
m为散列表长, di为增量序列
注: 不能随便删除元素, 需要标记后定期维护
- 线性探测法: di = 0, 1, 2 ... m-1 这样可能会争夺正常映射的散列表位置
- 平方探测法(二次探测法): \(d_i = 0^2, 1^2, (-1)^2, 2^2...k^2, (-k)^2\) k<=m/2, 散列表长度 m 必须是一个可以表示成 4k+3 (?)的素数(如此可以保证, 只要散列表中有一半空元素, 就一定能插入)
- 双散列法\(d_i = h_2(key)\): \(h_i=[h(key)+i*h_2(key)]\%m\) i为冲突次数
- 伪随机序列法: di = 伪随机序列
拉链法: 存储在线性链表中
排序
插入排序
寻找第一个未排序的元素, 将未排序的元素插入已排序的前端序列
vector<int> sortArray(vector<int>& nums) { |
空间复杂度: S(1)
时间复杂度: 最好(有序)O(n), 最坏(逆序)O(n2), 平均: 比较次数=移动次数=\(\frac{n^2}4\)
从后向前比较移动时: 稳定
折半插入排序
对有序序列进行二分查找
void HalfInsertSort(ElemType list[], int length) { |
平均时间复杂度: 比较次数 = nlog2n, 移动次数 = n2/4
稳定
希尔排序(缩小增量排序)
以 gap 分组为 length/gap 个组, 每个组(跳跃间隔)各自排序, gap 逐渐缩小到 1
void ShellSort(int list[], int length) { |
空间复杂度: 1
时间复杂度: 约为 n1.3, 最坏 n2
不稳定
冒泡排序
每次排序将未排序序列中最大的元素移到未排序序列最后, 但是两两比较
// 普通冒泡排序 |
空间复杂度: 1
时间复杂度: 最好(顺序) n-1. 最坏(逆序): 比较次数:\(\frac{n(n-1)}2\), 移动次数: \(\frac{3n(n-1)}2\) (3是 swap 函数的时间复杂度)
稳定
快速排序
一次确定一个元素的位置, 保证确定的元素左右两边分别>=和<=
int Partition(ElemType list[], int low, int high) { |
空间复杂度(栈): 最好=平均=log2n, 最坏 = n
时间复杂度: 最坏:每次划分都在端点处 n2, 最好:每次划分都在中点 nlog2n, 平均nlog2n
不稳定
简单选择排序
从未排序序列中找到最小元素, 插入已排序元素之后
void SelectSort(ElemType list[], int length) { |
空间复杂度: 1
时间复杂度: 比较: \(\frac{n(n-1)}2\), 移动最好 0 最坏 3 * (n-1), 总体n2 (移动一次要三次操作)
不稳定
堆排序
大根堆: L(i)>=L(2i) && L(i)>=L(2i+1) 任意节点的值<=父结点的值 i 从 1 开始
小根堆: L(i)<=L(2i) && L(i)<=L(2i+1)
对于最大堆和最小堆,删除操作是针对堆顶元素而言的,即把末尾元素移动到堆顶,再自定向下(重复构建堆的操作),递归调整。 增加操作是将新元素置于最后
void adjust(ElemType list[], int len, int index) { |
空间复杂度: 1
时间复杂度: nlogn
不稳定
归并排序
小组排序, 合并成大组
ElemType assist_array[100]; // length of list |
空间复杂度: n
时间复杂度: nlog2n
稳定
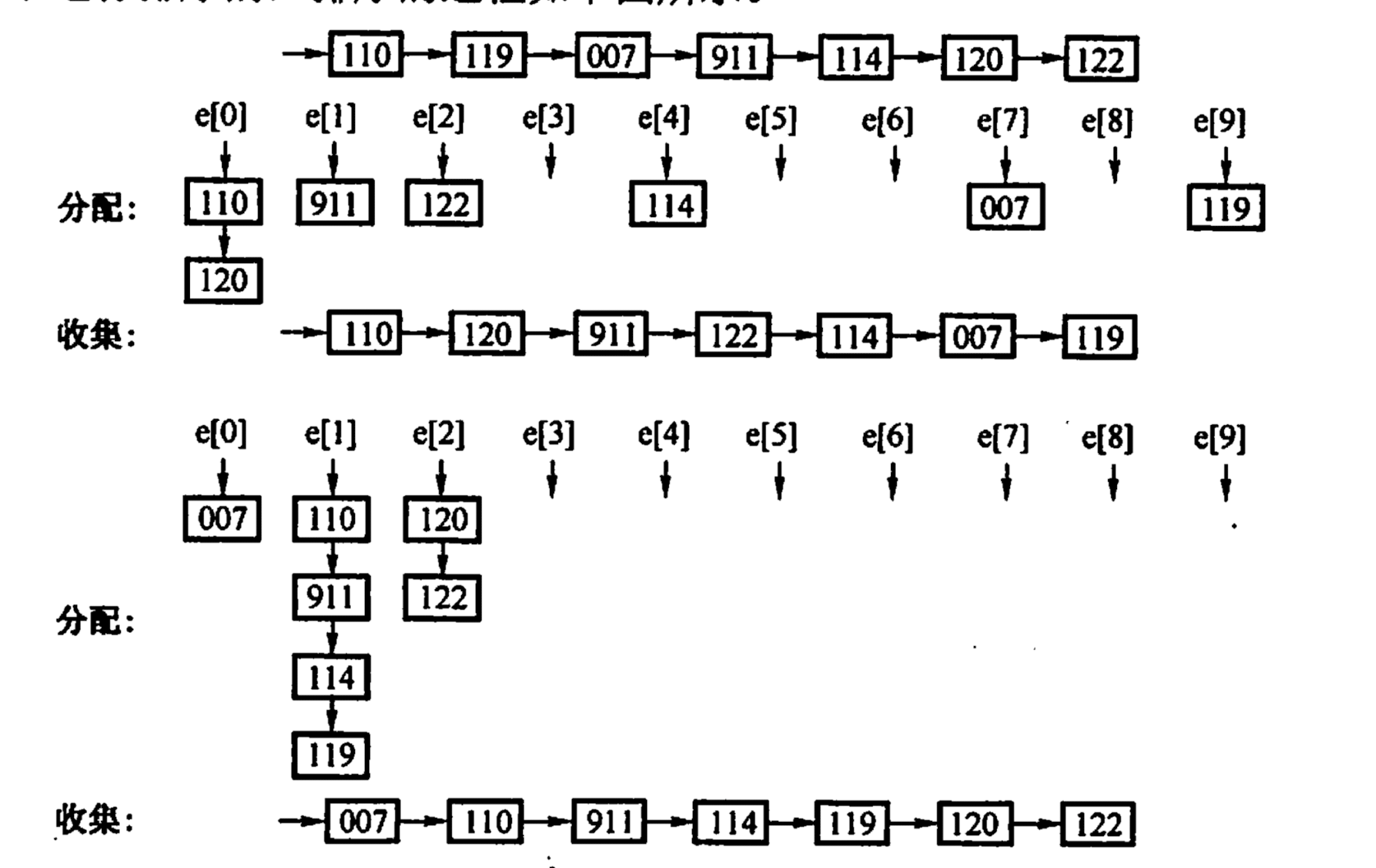
基数排序
将关键字拆分为组(如个十百千万) , 每个组排序一次
空间复杂度: r, r 为每个组有多少个可能的值(例如 10)
时间复杂度: d*(n+r), d 是关键字的组数
稳定
排序算法的比较
| 算法 | 最好时间 | 平均时间 | 最坏时间 | 空间 | 稳定 |
|---|---|---|---|---|---|
| 直接插入 | n | n2/4 | n2 | 1 | yes |
| 折半插入 | n | n2/4 (nlog2n) |
n2 | 1 | yes |
| 希尔 | ? | n1.3 | n2 | 1 | no |
| 冒泡 | n-1 | n2 | n(n-1)/2 | 1 | yes |
| 快速 | nlog2n | nlog2n | n2 | log2n ~n |
no |
| 简单选择 | n(n-1)/2 | n(n-1)/2 | n(n-1)/2 | 1 | no |
| 堆 | nlog2n | nlog2n | nlog2n | 1 | no |
| 归并 | nlog2n | nlog2n | nlog2n | n | yes |
| 基数 | d*(n+r) | d*(n+r) | d*(n+r) | r | yes |
归并排序:
- 将外存文件分成多个文件, 将文件内部依次内部排序, 然后写入外存
- 对内部排序后的文件归并, 直到整个文件有序
每一趟归并都需要读一遍所有数据, 写一遍所有数据
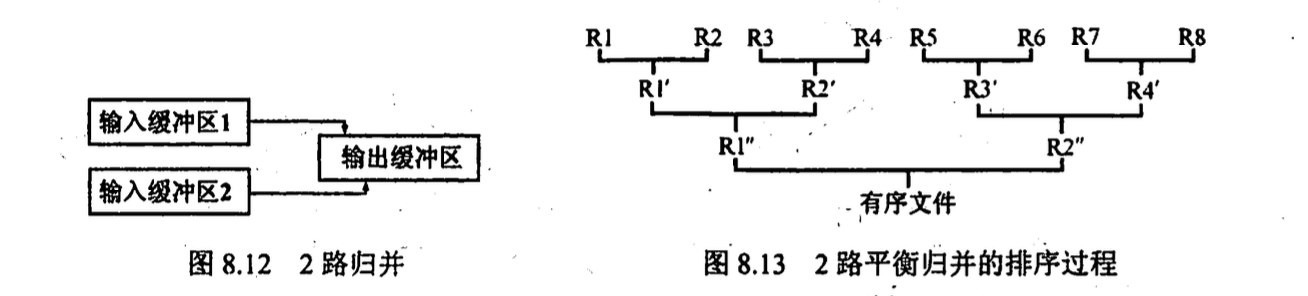
如图所示是三次归并
\(外部排序总时间 = 内部排序所需时间+外存信息读写时间+内部归并所需时间\)
多路平衡归并与败者树
路数k增加时, 每趟归并需要进行的比较次数为\((n-1)(k-1)\)
总比较次数就为
\(\lceil log_kr \rceil(n-1)(k-1) = \frac{\lceil log_2r \rceil(n-1)(k-1)}{log_2k}\) n为元素个数, r 为初始分段段数, k 为归并路数, \(\lceil log_kr \rceil\)为归并趟数, 可以得出, 当 k 增加时, 内部排序的时间会增加
败者树: 增加 k 不会增加内部排序比较次数
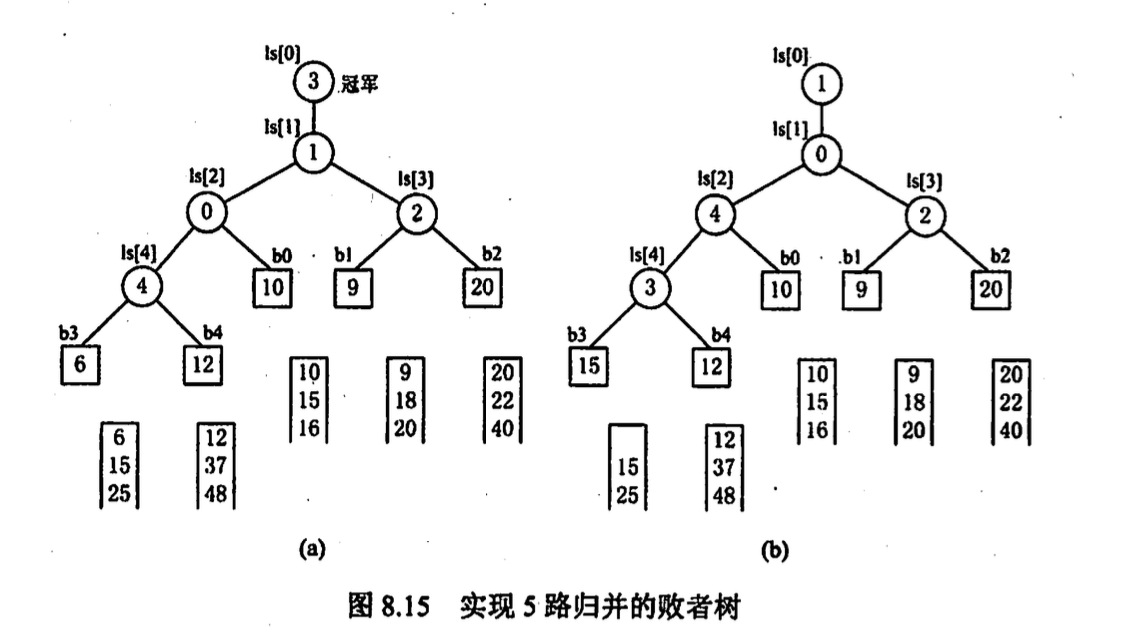
比较次数: \(\lceil log_kr \rceil(n-1) \lceil log_2k \rceil= \lceil log_2r \rceil(n-1)\)
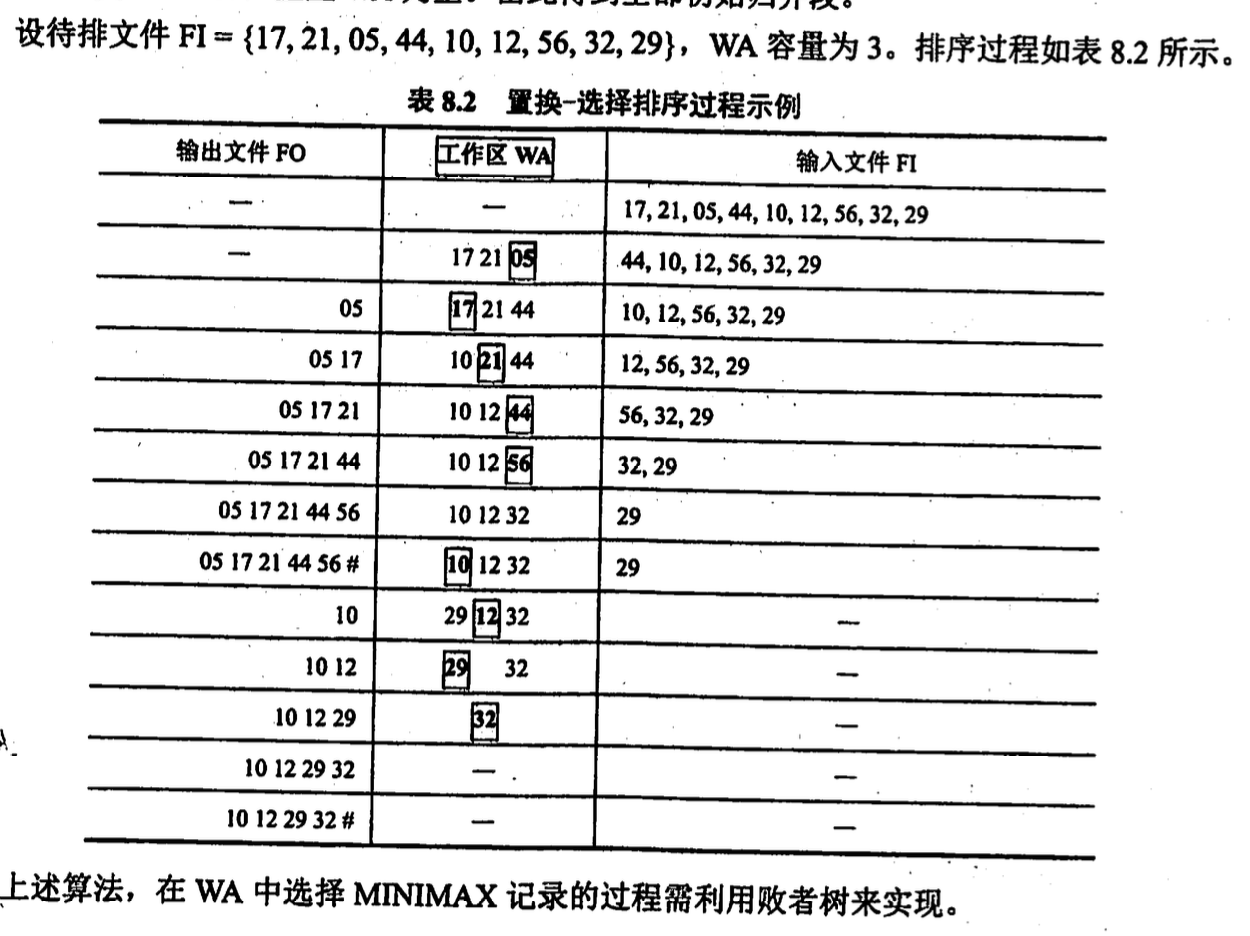
置换-选择排序(生成初始归并段)
考虑到内存大小有限, 为了减少归并段个数 r, 提出本算法
初始待排文件 fi, 初始归并段输出文件 fo, 内存工作区 wa, wa 可以容下 w 个记录, 有以下步骤
- 从 fi 输入 w 记录到 wa
- 从 wa 中选出关键字最小的记录, 记为 minw (使用败者树)
- 将 minw 输出到 fo
- 若 fi 不为空, 从 fi输入 1 个记录到 wa
- 从 wa 中所有关键字比 minw 大的记录中选择最小的记录, 作为新的 minw
- 重复 3~5, 直到 wa 中选不出 minw, 输出一个归并段结束符到 fo
- 重复 2~6, 直到 wa 空, 结束
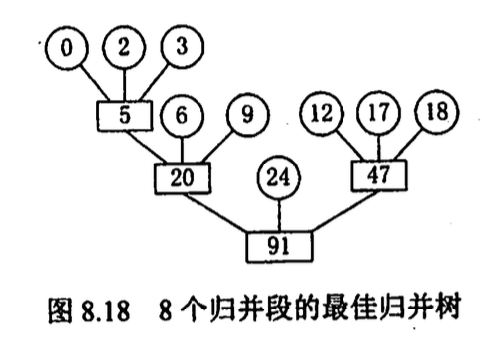
最佳归并树
为了统一置换选择产生的归并段的长度, 做归并平衡, 利用哈夫曼树, 并添加虚段使其是一棵完全树
\(n_0 = (k-1)n_k+1\)
\(n_k = \frac{(n_0-1)}{k-1}\)
其中 k 为叉数
当 \((n_0-1\%{k-1}=u)\) 时, 应该添加\(k-u-1\)个虚段